Minimal Basics of CUDA Programming
· 30 min read
GPUs are fast because of parallelism. The NVIDIA RTX 4090 has 16,384 CUDA cores (smaller, specialized compute units) compared to a high-end CPU's 16 to 24 general-purpose cores. Each GPU core is individually slower than a CPU core, but 16,384 of them running at once more than makes up for it.
CUDA is a C++ extension for writing programs that run on the GPU. A workload is split into small pieces, with each piece running on a separate core in parallel.
PyTorch and JAX hide most of this complexity. A tensor is allocated, tensor.cuda() or tensor.to(device) is called, and the framework launches CUDA kernels behind the scenes. Under the hood, these frameworks call into CUDA libraries like cuBLAS for matrix multiplication and cuDNN for deep learning primitives.
For instance, performing vector addition in PyTorch is as simple as:
import torch
# Create two large vectors on the GPU
a = torch.rand(1000000, device='cuda')
b = torch.rand(1000000, device='cuda')
# Add them elementwise
c = a + b
This launches a GPU kernel—a function that runs on the GPU—adding corresponding elements of a and b in parallel. PyTorch handles the GPU memory management and thread launching automatically.
Squeezing out more performance for a specialized workload, however, requires understanding what is happening underneath.
Quiz
Consider comparing CPUs to databases and GPUs to MapReduce workers, which operation would theoretically perform WORSE on a GPU compared to a CPU?
CUDA Kernels and Threading Model
A kernel is a function that runs on the GPU. A kernel launch creates hundreds or thousands of parallel threads that execute that function simultaneously on different data. This is called the Single-Instruction Multiple-Thread model (SIMT): one program, many data pieces.
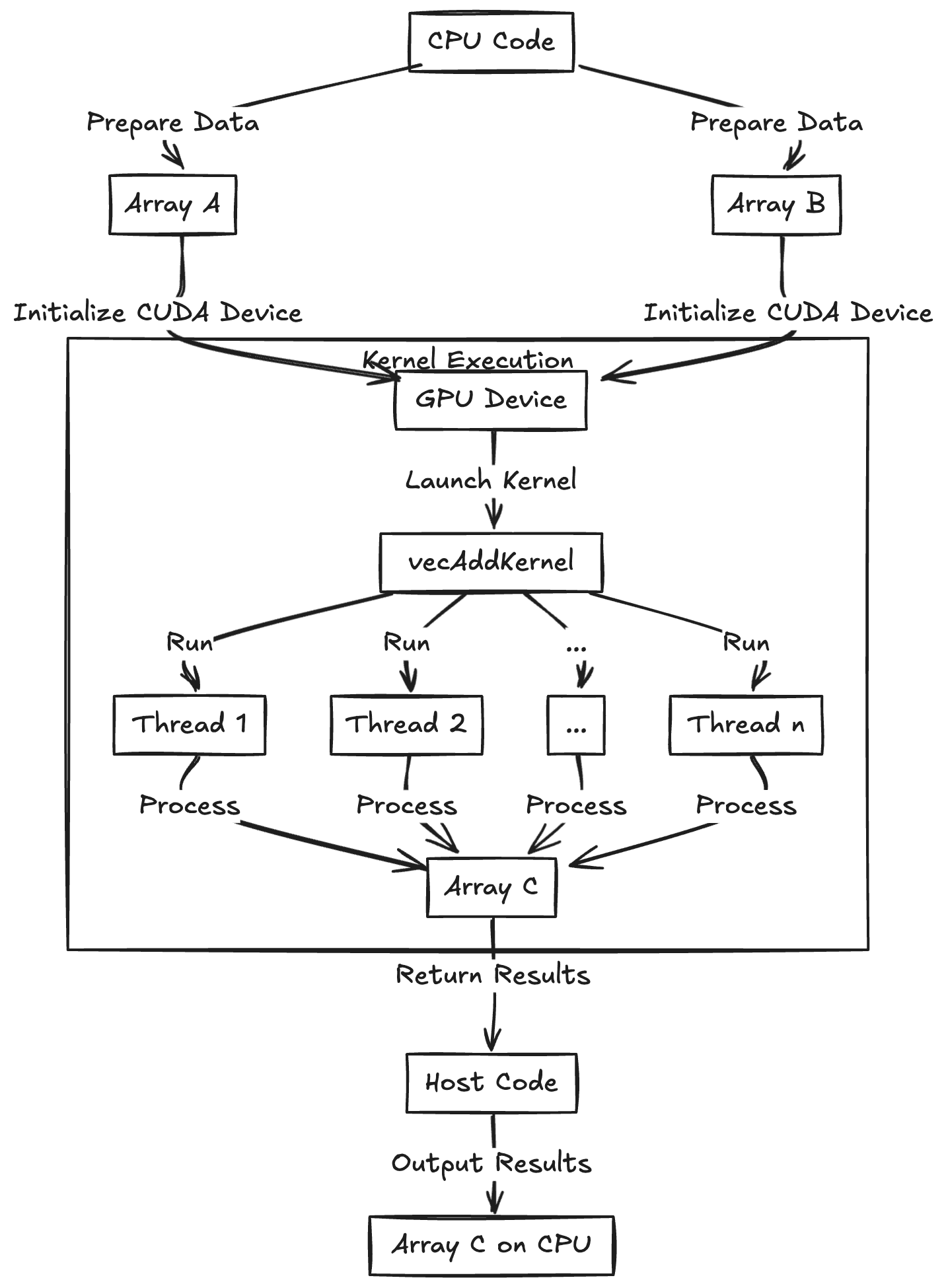
To add two arrays of numbers (A and B) and produce an output array (C), this is the CUDA C++ kernel function:
__global__ void vecAddKernel(float *A, float *B, float *C, int n) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < n) {
C[idx] = A[idx] + B[idx];
}
}
This code gives each thread a unique index idx into the arrays. The kernel uses each thread's index to have that thread add one element from A and B. The __global__ qualifier means this function is a CUDA kernel that runs on the device (GPU) and can be launched from host (CPU) code. The if (idx < n) guard is needed because slightly more threads than the array length may be launched; those extra threads simply do nothing if their index is out of range.
Kernel execution begins in the main CPU program (the "host code"), which configures how many threads to run. The kernel itself runs on the GPU, but host code is needed to configure and launch it. For example:
int N = 1000000;
int threadsPerBlock = 256;
int numberOfBlocks = (N + threadsPerBlock - 1) / threadsPerBlock;
vecAddKernel<<< numberOfBlocks, threadsPerBlock >>>(d_A, d_B, d_C, N); // Launch configuration
This CPU code configures and starts the GPU kernel, specifying numberOfBlocks * threadsPerBlock total threads, arranged as numberOfBlocks blocks of threadsPerBlock threads each.
CUDA organizes threads into warps (groups of 32 threads that execute together), which are further grouped into blocks. Each block runs on a Streaming Multiprocessor (SM), which has limited resources like registers and shared memory. The block size affects how these resources are allocated and how many warps can run concurrently (a concept known as occupancy).
When threads in a warp hit an if-statement and some take one path while others take another, execution serializes. The hardware uses mask bits to track which threads should run each path—correct, but slower. Here's an example of warp divergence:
__global__ void divergentKernel(float *data, int n) {
int idx = blockIdx.x * blockDim.x + threadIdx.x;
if (idx < n) {
// This condition causes warp divergence because threads within
// the same warp may take different paths
if (data[idx] > 0.5f) {
data[idx] *= 2.0f; // Some threads do this
} else {
data[idx] += 1.0f; // While others do this
}
}
}
// Launch configuration considering SM resources
int maxThreadsPerSM = 1024; // Example resource limit
int registersPerThread = 32;
int sharedMemoryPerBlock = 1024; // bytes
// Choose block size to maximize occupancy while respecting limits
int threadsPerBlock = 256; // Multiple of warp size (32)
int numberOfBlocks = (N + threadsPerBlock - 1) / threadsPerBlock;
divergentKernel<<<numberOfBlocks, threadsPerBlock>>>(d_data, N);
The GPU's scheduler manages blocks across available SMs. If there are more blocks than SMs, blocks wait in a queue and are scheduled as resources become available. This scheduling depends on factors like available shared memory and register file size per SM, which limit how many blocks can run concurrently.
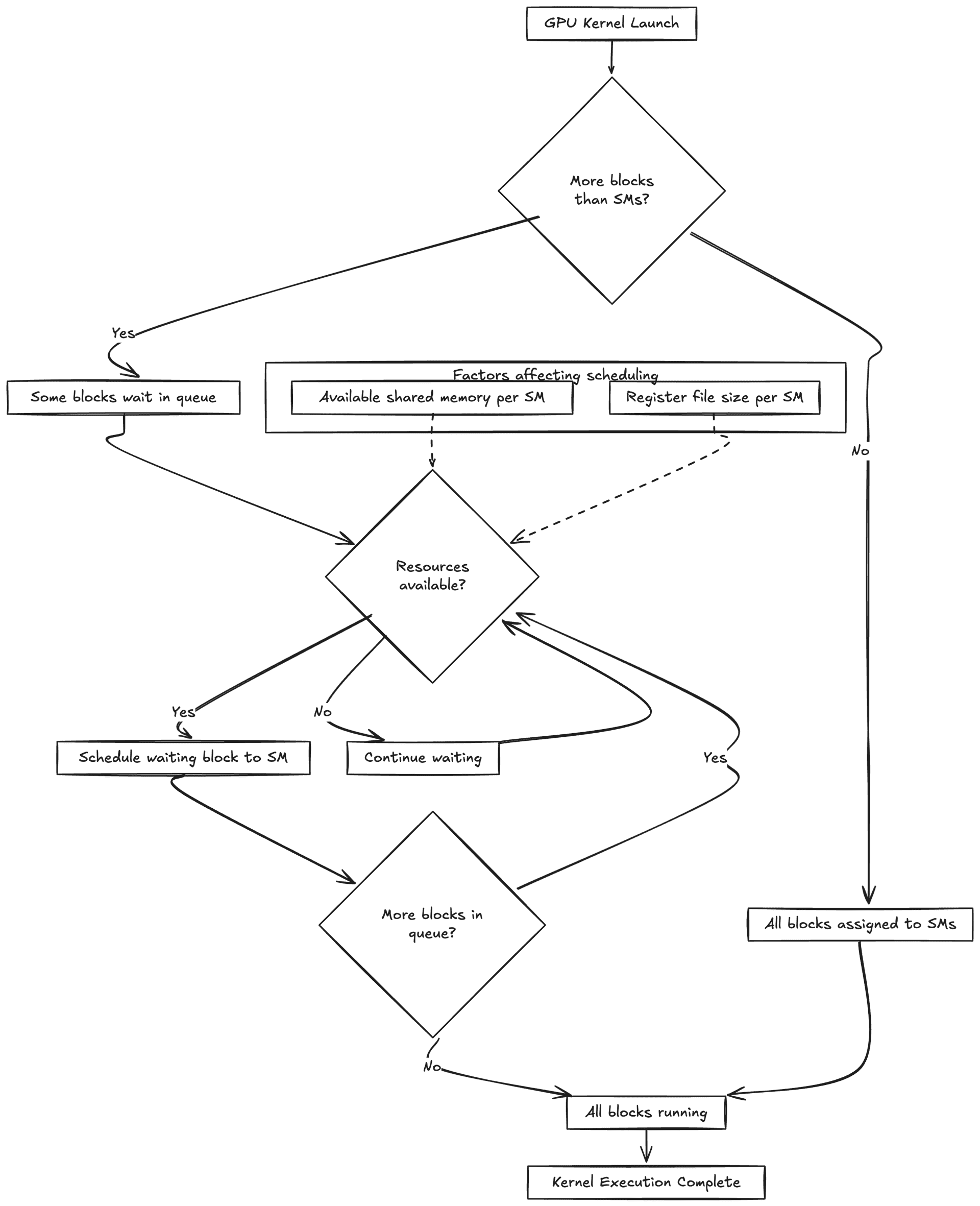
In practice, choosing the wrong block size can tank performance. Getting it right means balancing parallelism against resource usage on each SM.
Quiz
What role does the thread block size play in CUDA kernel performance?
Thread Blocks and Grids
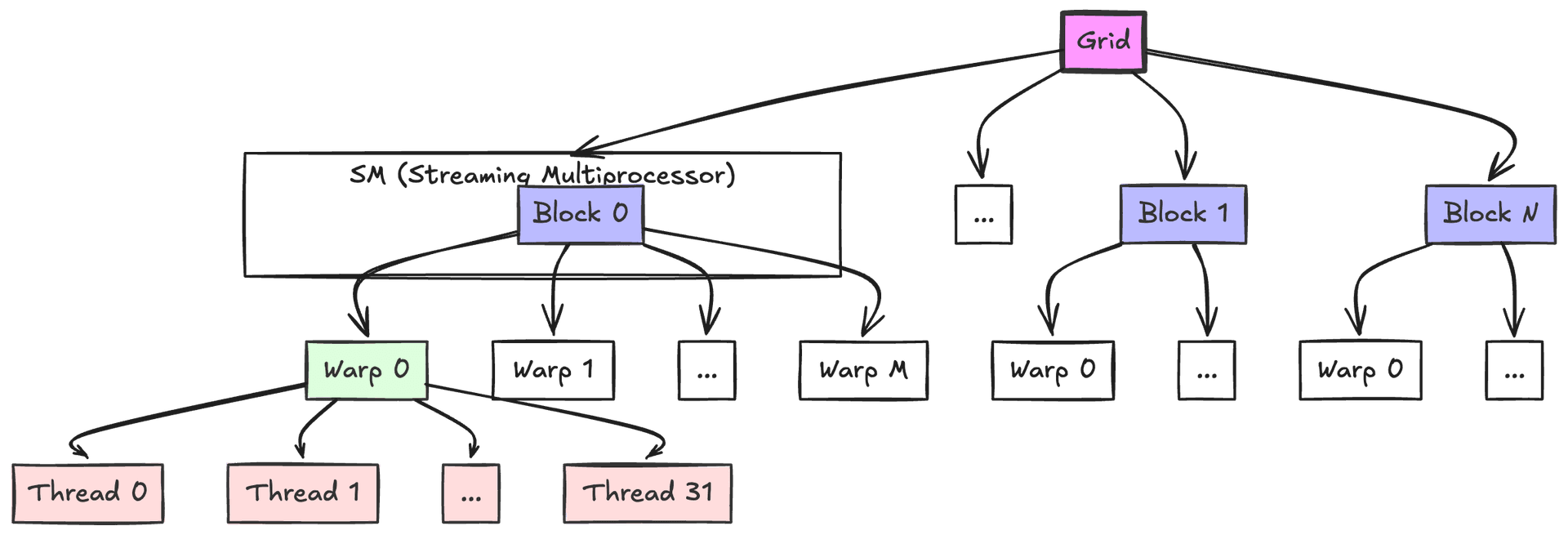
Now that threads are organized into warps (32 threads each), grouped into blocks, and scheduled onto Streaming Multiprocessors (SMs), let's zoom out.
A thread block is a group of threads that cooperate via shared memory and synchronization, all running on the same SM. Think of a block as a team of threads working together on a portion of the data. The grid is all the blocks launched by a kernel—every team tackling the entire problem. The diagram below shows how the grid breaks into blocks, blocks into warps, and warps into threads.
One reason for blocks is purely practical: there is a hardware limit on how many threads can be launched in a single block (typically 1024 threads maximum in current GPUs). Problems requiring more threads must be split into multiple blocks. Adding two arrays of 2048 elements, for example, requires 2 blocks of 1024 threads each: block 0 handles indices 0–1023, and block 1 handles indices 1024–2047. In general, given N elements and a maximum of B threads per block, ceil(N/B) blocks are launched so that all elements are covered. The earlier vector addition example launched 3907 blocks of 256 threads to handle 1,000,000 elements. The collection of all these blocks (3907 of them) is the grid.
Another reason for blocks is that they allow scaling and scheduling flexibility. A GPU has a fixed number of SMs (say, 20). Each SM can run a few blocks at a time, depending on resource availability. If 100 blocks are launched and only 20 can run concurrently (one per SM), the GPU starts 20 blocks in parallel and schedules the next block on a free SM as soon as one finishes.
Collectively, those 100 blocks produce the result as if 100 × blockSize threads ran at once. The runtime distributes them across hardware. A workload can exceed the number of threads the GPU can physically run simultaneously—the scheduler simply time-slices blocks as needed. Blocks also provide control over how much work runs in parallel, which matters under shared memory or register constraints.
Threads within a block can share a fast, on-chip memory space and synchronize using barriers. This is what makes intra-block cooperation practical. The mechanism only works within a block, however; threads in different blocks must go through slower global memory and cannot directly synchronize with each other. That constraint is deliberate: it lets the scheduler place blocks on any SM without worrying about cross-block dependencies, so CUDA programs scale across GPUs with different numbers of SMs.
In practice, powers of 2 are used for threads per block (128, 256, or 512) to align with the warp size of 32. The choice has an outsized impact—it affects how well the GPU can hide memory latency by swapping between warps while others wait on data.
Here's a simple example that demonstrates how blocks and grids work together to process a large array:
__global__ void processLargeArray(float* input, float* output, int N) {
// Calculate global thread index from block and thread indices
int idx = blockIdx.x * blockDim.x + threadIdx.x;
// Guard against out-of-bounds access
if (idx < N) {
// Each thread processes one element
// For this example, just multiply each element by 2
output[idx] = input[idx] * 2.0f;
}
}
// Host code to launch the kernel
void launchProcessing(float* d_input, float* d_output, int N) {
// Choose number of threads per block (power of 2, <= 1024)
const int threadsPerBlock = 256;
// Calculate number of blocks needed to process N elements
int numBlocks = (N + threadsPerBlock - 1) / threadsPerBlock;
// Launch kernel with calculated grid dimensions
processLargeArray<<<numBlocks, threadsPerBlock>>>(d_input, d_output, N);
}
The kernel uses blockIdx.x, blockDim.x, and threadIdx.x to calculate a unique global index for each thread. The host code checks array bounds because the number of threads may be rounded up to the next block size, and it calculates the required number of blocks using ceiling division. Each thread processes exactly one element—a clean one-to-one mapping between threads and data.
Quiz
Why can't we launch a single block with 10,000 threads to handle 10,000 tasks on the GPU?
Memory Management in CUDA
In CUDA, data movement between CPU (host) and GPU (device) must be managed explicitly. The CPU and GPU have separate memory spaces: RAM for the CPU, VRAM for the GPU. Neither can access the other directly—data has to be copied across the PCIe (or NVLink) bus. Compared to PyTorch, where moving a tensor to the GPU is a single line, this feels like considerable ceremony.
In raw CUDA C/C++, a common pattern is: allocate memory on the GPU (cudaMalloc), copy data from host to device (cudaMemcpy), launch kernels to do computation, copy results back to host, and finally free GPU memory (cudaFree).
Using vecAddKernel from earlier, the code looks like this:
int N = 1000000;
size_t bytes = N * sizeof(float);
// Allocate host memory and initialize
float *h_A = (float*)malloc(bytes);
float *h_B = (float*)malloc(bytes);
float *h_C = (float*)malloc(bytes);
// ... fill h_A and h_B with data ...
// Allocate device memory
float *d_A, *d_B, *d_C;
cudaMalloc(&d_A, bytes);
cudaMalloc(&d_B, bytes);
cudaMalloc(&d_C, bytes);
// Copy input arrays from host to device
cudaMemcpy(d_A, h_A, bytes, cudaMemcpyHostToDevice);
cudaMemcpy(d_B, h_B, bytes, cudaMemcpyHostToDevice);
// Launch kernel (using, say, 256 threads per block as before)
int threads = 256;
int blocks = (N + threads - 1) / threads;
vecAddKernel<<<blocks, threads>>>(d_A, d_B, d_C, N);
// Copy result array back to host
cudaMemcpy(h_C, d_C, bytes, cudaMemcpyDeviceToHost);
// Free device memory
cudaFree(d_A);
cudaFree(d_B);
cudaFree(d_C);
Quiz
What is the correct sequence of CUDA memory operations when working with GPU data?
Shared Memory and Synchronization
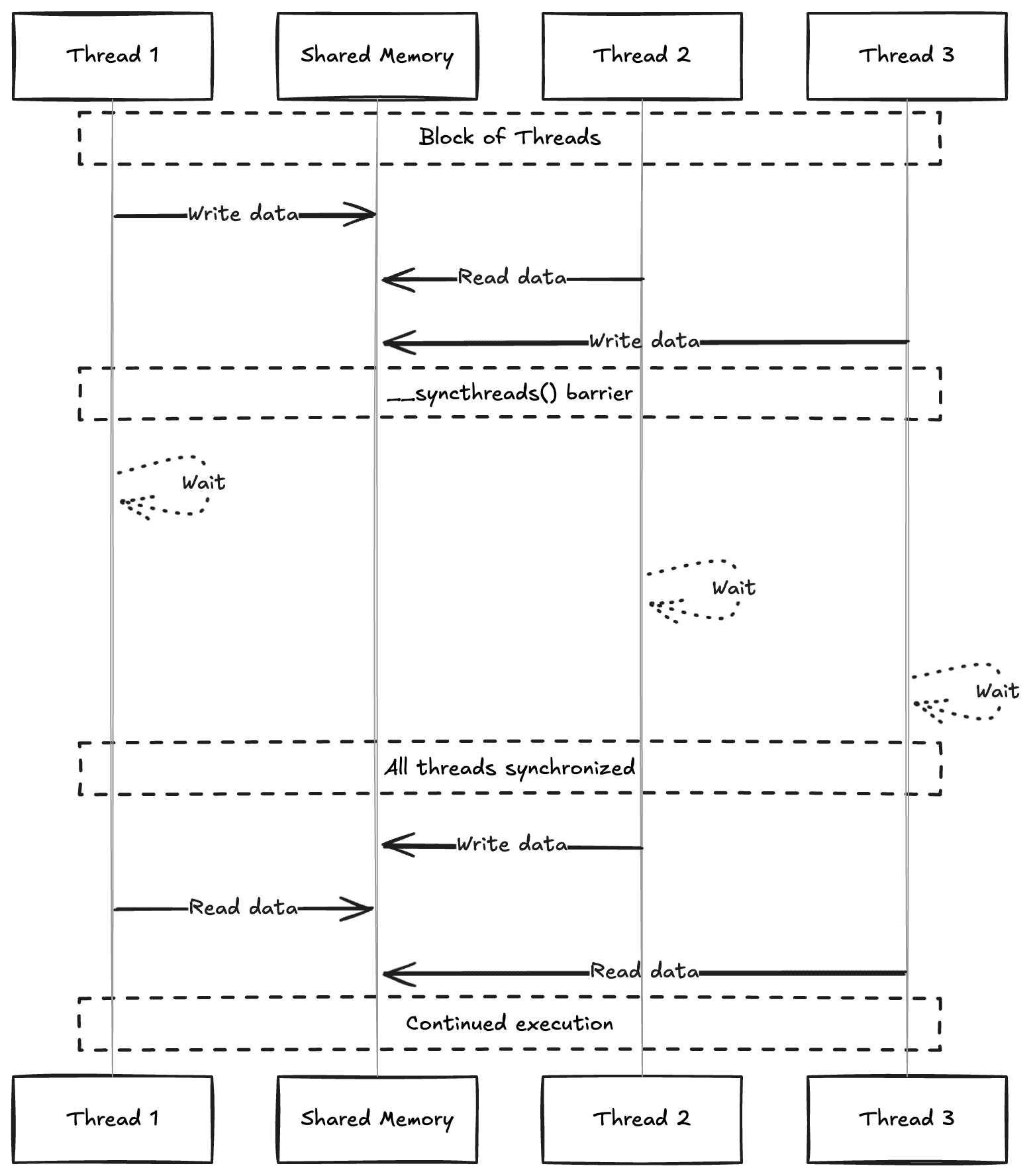
CUDA provides access to shared memory, a fast on-chip memory that all threads in a block can read and write.
Access is coordinated via __syncthreads() (or cuda.syncthreads() in Numba), which acts as a barrier—every thread in the block waits until all threads reach that point before any of them continue. The same idea as locks or barriers in Python multi-threading, but at the GPU level.
A simple example:
__global__ void incrementElements(float *data, int n) {
__shared__ float tile[256]; // declare shared memory array
int idx = blockIdx.x * blockDim.x + threadIdx.x;
int tid = threadIdx.x;
if (idx < n) {
// Load element from global memory to shared memory
tile[tid] = data[idx];
__syncthreads(); // ensure all loads complete
// Each thread increments its element in shared memory
tile[tid] += 1.0f;
__syncthreads(); // ensure all threads finished updating
// Write the result back to global memory
data[idx] = tile[tid];
}
}
Quiz
What is the primary purpose of shared memory in CUDA programming?
Fused CUDA Kernels for LLMs
LLM workloads pushed people to write custom CUDA kernels that fuse multiple operations into one, cutting down on memory traffic [1, 1]. The most well-known example is FlashAttention [1], which speeds up Transformer self-attention by reducing memory reads and writes.
Standard Transformer self-attention is:
where , , and are the query, key, and value matrices, and is the dimension of the key vectors.
FlashAttention tiles this computation in GPU shared memory so that data gets read from and written to global memory far fewer times. The speedup is especially noticeable for long sequences.
Understanding how CUDA kernels work at this level has been instrumental in writing custom fused kernels that beat naive PyTorch implementations.
FlashAttention: PyTorch vs CUDA Implementation
PyTorch Implementation
import torch, math
def flash_attention_pytorch(Q, K, V, block_size=16):
"""
Compute attention scores with memory-efficient block-wise operations.
Args:
Q: Query matrix [N_out x d]
K: Key matrix [N_inp x d]
V: Value matrix [N_inp x d]
block_size: Size of blocks for tiled computation
Returns:
O: Output matrix [N_out x d]
"""
N_out, d = Q.shape
N_inp = K.shape[0]
# Initialize output tensors
O = torch.zeros(N_out, d, device=Q.device)
L = torch.zeros(N_out, 1, device=Q.device)
# Calculate number of blocks needed
T_c = (N_inp + block_size - 1) // block_size # Ceiling division
T_r = (N_out + block_size - 1) // block_size
scale_factor = 1 / math.sqrt(d)
# Process Q and O in T_r blocks; K, V in T_c blocks
for i in range(T_r):
# Get current block of queries
q_start = i * block_size
q_end = min((i + 1) * block_size, N_out)
Q_block = Q[q_start:q_end]
# Initialize block accumulators
O_block = torch.zeros(q_end - q_start, d, device=Q.device)
L_block = torch.zeros(q_end - q_start, 1, device=Q.device)
m_block = torch.full((q_end - q_start, 1), float('-inf'), device=Q.device)
last_m = m_block.clone()
# Process K,V in blocks
for j in range(T_c):
k_start = j * block_size
k_end = min((j + 1) * block_size, N_inp)
K_block = K[k_start:k_end]
V_block = V[k_start:k_end]
# Compute attention scores for this block
S_block = scale_factor * (Q_block @ K_block.T) # [B_r x B_c]
# Update running maximum for numerical stability
m_block = torch.maximum(m_block, S_block.max(dim=-1, keepdim=True).values)
# Compute attention weights with numerical stability
P_block = torch.exp(S_block - m_block) # [B_r x B_c]
# Update accumulators with scaling factor from updated maximum
scaling_factor = torch.exp(last_m - m_block)
L_block = scaling_factor * L_block + P_block.sum(dim=-1, keepdim=True)
O_block = scaling_factor * O_block + P_block @ V_block
last_m = m_block.clone()
# Store results for this block
O[q_start:q_end] = O_block / L_block # Normalize with accumulated sum
L[q_start:q_end] = L_block
return O
The key ideas: matrices are processed in blocks so the full attention matrix never needs to live in memory at once; the max-trick provides numerical stability in softmax; and a running maximum (last_m) rescales previous computations whenever a new max appears. Results accumulate block by block, so long sequences do not blow up memory.
CUDA Implementation
The equivalent CUDA kernel fuses these operations:
constexpr int BLOCK_SIZE = 16;
constexpr int HIDDEN_DIM = 128;
extern "C" __global__ void flash_attention_cuda(
float* output, // [N_out x d]
float* output_lse, // [N_out]
const float* query, // [N_out x d]
const float* key, // [N_inp x d]
const float* value, // [N_inp x d]
const float scale,
const int N_out,
const int N_inp) {
// Shared memory for block-wise computation
__shared__ float q_block[BLOCK_SIZE][HIDDEN_DIM];
__shared__ float k_block[BLOCK_SIZE][HIDDEN_DIM];
__shared__ float v_block[BLOCK_SIZE][HIDDEN_DIM];
// Thread indices
const int tx = threadIdx.x;
const int ty = threadIdx.y;
const int row = blockIdx.x * BLOCK_SIZE + tx;
// Local accumulators in registers
float m_i = -INFINITY;
float l_i = 0.0f;
float o_i[HIDDEN_DIM] = {0.0f};
// Process input in tiles
for (int tile = 0; tile < (N_inp + BLOCK_SIZE - 1) / BLOCK_SIZE; ++tile) {
// Load query block (done once per outer loop)
if (tile == 0 && row < N_out) {
for (int d = 0; d < HIDDEN_DIM; d += blockDim.y) {
int d_idx = d + ty;
if (d_idx < HIDDEN_DIM) {
q_block[tx][d_idx] = query[row * HIDDEN_DIM + d_idx];
}
}
}
__syncthreads();
// Load key and value blocks
if (tile * BLOCK_SIZE + ty < N_inp && row < N_out) {
for (int d = 0; d < HIDDEN_DIM; d += blockDim.y) {
int d_idx = d + ty;
if (d_idx < HIDDEN_DIM) {
k_block[tx][d_idx] = key[(tile * BLOCK_SIZE + tx) * HIDDEN_DIM + d_idx];
v_block[tx][d_idx] = value[(tile * BLOCK_SIZE + tx) * HIDDEN_DIM + d_idx];
}
}
}
__syncthreads();
// Compute attention scores and update accumulators
if (row < N_out) {
float m_prev = m_i;
// Compute scores and find max for stability
float max_score = -INFINITY;
float scores[BLOCK_SIZE];
#pragma unroll
for (int j = 0; j < BLOCK_SIZE && tile * BLOCK_SIZE + j < N_inp; ++j) {
float score = 0.0f;
#pragma unroll
for (int d = 0; d < HIDDEN_DIM; ++d) {
score += q_block[tx][d] * k_block[j][d];
}
scores[j] = scale * score;
max_score = max(max_score, scores[j]);
}
// Update running max and scale previous results
m_i = max(m_i, max_score);
float scale_factor = exp(m_prev - m_i);
l_i *= scale_factor;
#pragma unroll
for (int d = 0; d < HIDDEN_DIM; ++d) {
o_i[d] *= scale_factor;
}
// Compute attention and update output
#pragma unroll
for (int j = 0; j < BLOCK_SIZE && tile * BLOCK_SIZE + j < N_inp; ++j) {
float p_ij = exp(scores[j] - m_i);
l_i += p_ij;
#pragma unroll
for (int d = 0; d < HIDDEN_DIM; ++d) {
o_i[d] += p_ij * v_block[j][d];
}
}
}
__syncthreads();
}
// Write final output
if (row < N_out) {
float inv_l = 1.0f / l_i;
for (int d = 0; d < HIDDEN_DIM; ++d) {
output[row * HIDDEN_DIM + d] = o_i[d] * inv_l;
}
output_lse[row] = l_i;
}
}
Why is the CUDA version faster? __shared__ memory replaces repeated slicing from global memory. Accumulators live in registers instead of tensor allocations. Rows get processed in parallel across threads rather than sequentially. The structured memory loads coalesce into fewer transactions, and #pragma unroll eliminates loop overhead that PyTorch's interpreter can't.